
Innholdsfortegnelse:
- Forfatter John Day day@howwhatproduce.com.
- Public 2024-01-30 11:23.
- Sist endret 2025-01-23 15:02.

For en tid siden postet jeg Wifi PPM -kontrolleren min. Det fungerer ganske bra. Bare rekkevidden er litt kort. Jeg fant en løsning på dette problemet. ESP8266 støtter en modus som kalles ESPNOW. Denne modusen er mye mer lavt nivå. Det mister ikke forbindelsen så lett, og hvis den mister tilkoblingen, kobles den til igjen umiddelbart.
Jeg bruker tre ESP8266. Den ene er ESPNOW -mottakeren, den andre er ESPNOW -avsenderen og den tredje er tilgangspunktet du kan koble til. Den tredje er nødvendig fordi ESPNOW -avsenderen ikke kan være et tilgangspunkt samtidig. Jeg har også lagt til noen antenner for å få bedre rekkevidde.
Det er et andre tilgangspunkt direkte på mottakeren. Hvis du kobler deg til dette, har du det samme som med det gamle WifiPPM -prosjektet.
Jeg har også lagt til støtte for MSP -protokollmottaker. Dette er "MultiWii Serial Protocol" som støttes av MultiWii, Betaflight, Cleanflight og mange andre flykontrollere.
Trinn 1: Deleliste




Du trenger tre ESP8266 -moduler av noe slag. Men du vil ha det beste utvalget. Så jeg foreslår at du bruker ESP8266 -moduler med antenner. Det fungerer også uten antenner. Jeg bruker følgende deler:
2 x ESP07 (ESP8266 -modul med antennekontakt)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX på mottakersiden
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / hann + I-PEX-adapter på avsendersiden
3, 3 V strømforsyning for alle ESP8266 -moduler
Du trenger også en PC med Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 støtte for Arduino IDE. Følg disse instruksjonene: https://learn.sparkfun.com/tutorials/esp8266-thin…Websocket bibliotek for Arduino:
Trinn 2: Last ned og flash skissene



Du kan laste ned skissene her.
Pakk ut filen. Det er tre mapper: Master-AP, Sender, Receiver
Master-AP: Det er skissen for tilgangspunktet. Åpne skissen med arduino IDE. Sett CPU -frekvensen til 160 MHz i verktøymemenyen og last opp skissen til ESP12.
Avsender: Det er skissen for MSPNOW -avsenderen. Still CPU -frekvensen til 160 MHz og last den opp til en av ESP07.
Du kan se på det første bildet hvordan du kobler til ESP8266 -modulen for blinking.
Koble nå til ESP12 (tilgangspunkt) og sender ESP07 serielle porter og strømtilkoblinger (andre bilde): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Start begge modulene og koble til tilgangspunktet "Long-Range-WifiPPM/MSP". Passordet er "WifiPPM/MSP"
Åpne en nettleser og åpne IP -adressen 192.168.4.1. Kontrollnettstedet vil vises. Klikk på "Wifi Info" -knappen. En meldingsboks med avsenderens MAC og mottakerens MAC vil vises.
Åpne mottakerskissen i Arduino IDE. Endre linjen "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (tredje bilde) til avsender -Mac -adressen som vises på nettstedet. Mottaker -Macen skal være ok. Sørg for at CPU -frekvensen er satt til 160 MHz og last opp skissen til den andre ESP05.
Trinn 3: Koble mottakeren til flykontrolleren og konfigurer Cleanflight



Koble nå mottakeren til flykontrolleren. Flykontrolleren din skal ha en 3,3 Volt utgang med minst 200 mA. Hvis ikke trenger du en ekstra 3, 3V spenningsregulator.
Koble GND for ESP til flykontrollens GND. Koble VCC for ESP til 3, 3V på flykontrollen eller til den ekstra 3, 3V spenningsregulatoren.
Du kan bruke PPM -utgangen eller den serielle MSP -utgangen.
For MSP -utgang, koble TX av ESP8266 til RX på en hvilken som helst seriell port på flykontrolleren. (Bilde 1)
For PPM -utgang, koble GPIO5 på ESP8266 til PPM -inngangen til flykontrolleren. (Bilde 1)
Etter at du har koblet ESP, start flykontrolleren og åpne cleanflight. Koble til mobiltelefonen din med tilgangspunktet "WifiPPM/MSP". Passordet er "WifiPPM/MSP"
For MSP: Åpne portfanen og sett MSP på den serielle porten du koblet ESP8266 til (Bilde 2). Lagre og start på nytt. Gå til konfigurasjonsfanen og sett mottakeren til "MSP seriell mottaker" (Bilde 3). Lagre og start på nytt.
For PPM: Les i håndboken til flykontrolleren hvordan du konfigurerer PPMGå til konfigurasjonsfanen og sett mottakeren til "PPM -mottaker" (Bilde 4). Lagre og start på nytt.
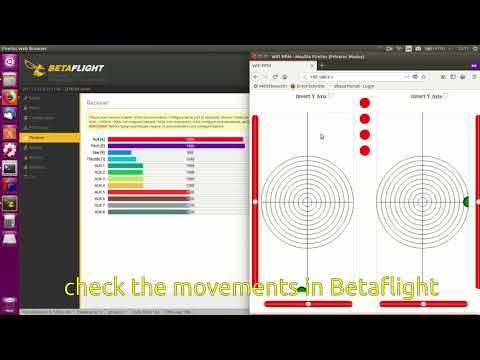
Det neste oppsettet er for begge mottakerne det samme: Gå til mottakerfanen. Sett kanalene til "RTAE1234" (Bilde 5/Video). Lagre oppsettet.
Åpne nå en nettleser på smarttelefonen din. Åpne nettstedet 192.168.4.1 (Bilde 6). Nå kan du sjekke kontrolleren.
Hvis det fungerer, start ESP8266 med to avsendere. Koble til tilgangspunktet "Long Range WifiPPM/MSP". Passordet er "WifiPPM/MSP". Åpne nettstedet 192.168.4.1 igjen. Sjekk igjen i cleanflight hvis det fungerer.
Koble antennene til ESP07 -modulene.
Trinn 4: Litt mer informasjon

Det er to tilgangspunkter ved normal drift. Tilgangspunktet "WifiPPM/MSP" er som det forrige WifiPPM -prosjektet. Du kan bruke den hvis du bare vil gjøre en rask flytur uten å koble til flere moduler når du ikke trenger langdistansetilkobling. Hvis du kobler til "Long Range WifiPPM/MSP", tar langdistansekontrolleren kontrollen.
Kanskje du vil vite hvor lang er "lang rekkevidde". Jeg vet egentlig ikke. Det er minst noen få hundre meter. Men jeg kunne ikke teste det før nå. Det mister ikke forbindelsen i hele leiligheten min.
Jeg la til MSP -kontroll fordi jeg trodde jeg kunne lage en bakkanal for telemetredata. Men det fungerte aldri stabilt. Uansett, MSP -protokollen er mer nøyaktig enn ppm, fordi den ikke er avhengig av timing så mye. Kanskje det gir problemer med sakte flykontrollere fordi det er stor trafikk på serieporten. Med min Noxe F4 flykontroller fungerer den uten problemer.
Hvis du har noen konfigurasjonsproblemer, kan du se på det gamle WifiPPM -prosjektet.
Anbefalt:
IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-and-Temperature-Sensor: 7 Steps

IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-And-Temperature-Sensor: Vibrasjon er virkelig en frem og tilbake bevegelse-eller svingning-av maskiner og komponenter i motoriserte gadgets. Vibrasjon i det industrielle systemet kan være et symptom, eller motiv, for en mas, eller det kan være forbundet med daglig drift. For eksempel osci
IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: 6 trinn

IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: I dette prosjektet vil vi måle vibrasjon og temperatur ved hjelp av NCD-vibrasjon og temperatursensorer, Esp32, ThingSpeak. Vibrasjon er virkelig en frem og tilbake bevegelse-eller svingning - av maskiner og komponenter i motoriserte gadgets. Vibrasjon i
Uni-directional WIFI Range Extender: 5 trinn (med bilder)
")
Uni-Directional WIFI Range Extender: Mottar enkelt WIFI-signaler langveisfra med en standard USB WIFI-adapter og litt oppfinnsomhet. Denne enkle ideen krever ingen endringer i en USB WIFI -adapter eller datamaskinen din. En enkel måte å øke signalstyrken og rekkevidden til WIF -en
Wifi PPM (ingen app nødvendig): 4 trinn (med bilder)
: 4 trinn (med bilder)")
Wifi PPM (ingen app nødvendig): Jeg ønsket å kontrollere min diy mikro innendørs quadrocopter med smarttelefonen min, men jeg fant ikke en god løsning for dette. Jeg hadde noen ESP8266 wifi -moduler liggende, så jeg bestemte meg for å lage min egen. Programmet starter et wifi -tilgangspunkt med en HTML
Billige WiFi Range Extender for IoT: 8 trinn

Billige WiFi Range Extender for IoT: Hvordan bygge din egen WiFi-forlenger fra en billig $ 2- $ 8 ESP8266 WiFi-modul *** EDIT: Siden dette instruerbare ble skrevet, har fastvaren blitt forbedret kraftig, med tillegg av en GUI-innstillingsside (som en vanlig ruter), brannmur, strømmann