![[vPython] Spider Robot Simulator: 4 trinn](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Spider Robot Simulator: 4 trinn")
Innholdsfortegnelse:
- Forfatter John Day day@howwhatproduce.com.
- Public 2024-01-30 11:25.
- Sist endret 2025-01-23 15:02.


Hvis du synes designet mitt er interessant, kan du gi en liten donasjon:
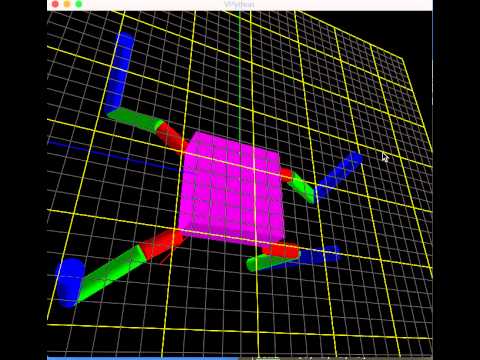
Jeg bruker vPython for å simulere handlingene for min Spider -robot. Det er lett å utvikle dine egne interesseaksjoner i pc/mac, og deretter overføre til arduino.
Det er den virkelige roboten som kan instrueres hvis du er interessert i den
www.instructables.com/id/DIY-Spider-RobotQu…
VPython er programmeringsspråket Python pluss en 3D -grafikkmodul kalt "visual", som ble stammet av David Scherer i 2000. VPython gjør det enkelt å lage navigerbare 3D -skjermer og animasjoner, selv for de med begrenset programmeringserfaring. Fordi den er basert på Python, har den også mye å tilby for erfarne programmerere og forskere.
Trinn 1: Installer VPython og Editor


installer python , Jeg foreslår at du bruker 2.7.x
www.python.org/
og deretter vpython
vpython.org/
og min favorittredaktør - PyCharm
www.jetbrains.com/pycharm/
Trinn 2: Last ned koden og kjør

Last ned koden og åpne den med PyCharm, kjør koden, og du vil se en fancy 3D -edderkopprobot på skjermen, og du kan bruke musen med den midterste knappen for å zoome inn/ut, den høyre knappen for å rotere.
Trinn 3: Utvikle handlingene dine i denne simulatoren
Det vil være morsomt hvis du kan utvikle flere interessante handlinger og dele med meg.
Trinn 4: Fjernkontroll til Real Spider Robot
Hva med å kontrollere den virkelige roboten ved hjelp av python thought bluetooth? Det kan være at du allerede vil prøve måten. Jeg legger det ut senere hvis noen trenger det.
Anbefalt:
DIY RACING GAME SIMULATOR -- F1 SIMULATOR: 5 trinn

DIY RACING GAME SIMULATOR || F1 SIMULATOR: Hei alle Velkommen til Min kanal, I dag skal jeg vise deg hvordan jeg bygger en " Racing Game Simulator " ved hjelp av Arduino UNO. dette er ikke en byggeblogg, det er bare oversikt og test av simulatoren. Fullstendig byggeblogg kommer snart
"Miles" Quadruped Spider Robot: 5 trinn

"Miles" Quadruped Spider Robot: Basert på Arduino Nano, er Miles en edderkopprobot som bruker sine 4 bein til å gå og manøvrere. Den bruker 8 SG90 / MG90 Servomotorer som aktuatorer for beina, består av en tilpasset PCB laget for å drive og kontrollere servoene og Arduino Nano.PCB har dedikert
Quadruped Spider Robot - GC_MK1: 8 trinn (med bilder)
")
Quadruped Spider Robot - GC_MK1: Edderkopproboten alias GC_MK1 beveger seg fremover og bakover og kan også danse avhengig av koden lastet på Arduino. Roboten bruker 12 mikro servomotorer (SG90); 3 for hvert ben. Kontrolleren som brukes til å kontrollere servomotorene er en Arduino Nan
Slik kobler du FlySky -sender til en hvilken som helst PC -simulator (ClearView RC Simulator) -- Uten kabel: 6 trinn
 -- Uten kabel: 6 trinn")
Slik kobler du FlySky -sender til en hvilken som helst PC -simulator (ClearView RC Simulator) || Uten kabel: Guide for å koble FlySky I6 med en datamaskin for å simulere flyging for nybegynnere av vingefly. Flysimuleringstilkobling ved bruk av Flysky I6 og Arduino krever ikke bruk av simuleringskabler
[DIY] Spider Robot (Quad Robot, Quadruped): 14 trinn (med bilder)
![[DIY] Spider Robot (Quad Robot, Quadruped): 14 trinn (med bilder)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Spider Robot (Quad Robot, Quadruped): 14 trinn (med bilder)")
[DIY] Spider Robot (Quad Robot, Quadruped): Hvis du trenger ekstra støtte fra meg, vil det være bedre å gi en passende donasjon til meg: http: //paypal.me/RegisHsu2019-10-10 oppdatering: Den nye kompilatoren vil føre til beregningsproblem med flytende tall. Jeg har allerede endret koden. 2017-03-26