
Innholdsfortegnelse:
- Forfatter John Day day@howwhatproduce.com.
- Public 2024-01-30 11:25.
- Sist endret 2025-01-23 15:02.

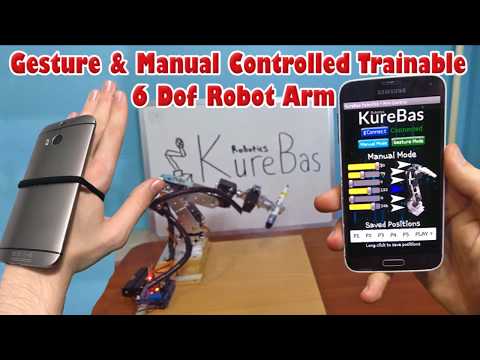
Det er to moduser i armen.
Først er manuell modus som du kan flytte armen med bluetooth i mobiltelefonen ved å flytte glidebryterne på appen. Samtidig kan du lagre posisjonene dine, og du kan spille …
For det andre er gestmodus som bruker telefonens orienteringssensor og nærhetssensor. Når de endres, sender appen kommandoer til arduino …
KureBasArm - Dette er et annet trinn for den nye roboten KureBas v 3.0
Trinn 1: brukte materialer

6 DOF Robotic Arm Set $ 35
6x MG996r Metal Servo $ 30
16 kanals Servo Shield $ 9
HC-06 Bluetooth-modul $ 2,50
2x 18650 Li-ion batterier $ 11,50
2x 18650 batteriholder $ 2
TOTAL KOSTNAD: $ 90
Trinn 2: Hvordan sette opp robotarmen


Trinn 3: Koding


Du kan få alle filene i denne lenken (kode og app)
drive.google.com/open?id=1JejPVpk6yYxPe6gNJJ5ALI4ptvwR07aD
Trinn 4: Telefonapplikasjon

Jeg lagde appen fra MIT APP oppfinner 2
Anbefalt:
Hvordan lage en bevegelseskontrollert rover: 4 trinn

Hvordan lage en bevegelseskontrollert rover: Her er instruksjonene for å bygge en bevegelseskontrollert rover (tele -operert rover). Den består av en rover -enhet som har en kollisjonssensor ombord. Senderen i stedet for å være en klumpete fjernkontroll er en kul hanske som kan brukes på
Bevegelseskontrollert mus: 6 trinn (med bilder)
")
Bevegelseskontrollert mus: Du ser på en film med vennene dine på en bærbar datamaskin, og en av gutta får en samtale. Ahh .. du må gå av sted for å sette filmen på pause. Du holder en presentasjon på en projektor og må bytte mellom applikasjoner. Du må flytte
Bevegelseskontrollert mus ved bruk av mikro: bit: 5 trinn

Gestkontrollert mus ved bruk av Micro: bit: INNLEDNING Prosjektet er en gestkontrollert mus, i form av en hanske med en micro: bit innebygd i den. Det er et prosjekt inspirert av en tidlig idé jeg hadde som en innebygd ingeniør. Jeg vil alltid ha tilgang til en trådløs mus og tastatur
Bevegelseskontrollert universell fjernkontroll med Node-MCU: 12 trinn

Bevegelseskontrollert universell fjernkontroll med Node-MCU: Hei alle sammen og velkommen til dette prosjektet! Jeg er en ganske lat person og et lat mareritt er å se på TV når du innser at fjernkontrollen er for langt unna! Jeg innså at fjernkontrollen aldri vil være for langt unna hvis jeg har den for hånden i det hele tatt
HVORDAN MONTERE EN IMPONERENDE TRE ROBOTARM (DEL 3: ROBOTARM) - BASERT PÅ MIKROEN: BITN: 8 trinn
 - BASERT PÅ MIKROEN: BITN: 8 trinn")
HVORDAN MONTERE EN IMPRESSIV TRE ROBOTARM (DEL 3: ROBOTARM) - BASERT PÅ MIKROEN: BITN: Den neste installasjonsprosessen er basert på fullføring av hindringsmodus. Installasjonsprosessen i forrige seksjon er den samme som installasjonsprosessen i linjesporingsmodus. Så la oss ta en titt på den endelige formen for A