")
Innholdsfortegnelse:
- Forfatter John Day day@howwhatproduce.com.
- Public 2024-01-30 11:22.
- Sist endret 2025-01-23 15:02.



Hei gutta..
Har du noen gang vandret for å lage et labyrintbrett som kan styres fra din Android -smarttelefon …!
Vel, du er på rett sted. Jeg bygde en til meg selv ved hjelp av Arduino og android.
Ikke bekymre deg, det er enkelt.. I dette prosjektet vil jeg vise deg hvordan du lager:
1. Labyrintbrett (jeg lagde det av gamle trekasser som lå rundt).
2. Android -app i appoppfinner for styring av brettet.
3. Skrive programmet i Arduino for kontroll av styret og
4. Sette opp kretsen….
Du kan senere bruke konseptet som er lært i andre prosjekter som du skal bygge..
Så uten å kaste bort mer tid, la oss starte ….!
Trinn 1: Samle komponentene



For dette prosjektet trenger du følgende elementer:
1. To servomotorer (jeg brukte mini og de fungerte for meg).
2. Arduino Uno. (Jeg foreslår at du kjøper det fra snapdeal, det er en klon, men det er verdt hver krone jeg brukte)
3. En Bluetooth -modul.
4. Et brødbrett.
5. Noen hoppetråder
6. Tynne tre- eller harde brett
7. spiker, noen nøkkelstenger fra gamle tastaturer
8. Thermocol (polystyren)
Trinn 2: Lag et labyrintbrett



Dette er den mekaniske delen av prosjektet..
Ta først et langt rektangel stykke treplank eller papp for basen. det må være større enn det faktiske vippebrettet..
Skjær to like store kubiske tre..
og legg en spiker til hver på en slik måte at de er aline i samme høyde fra basen. Kutt også et ekstra stykke tre for å legge til som en støtte til stolpene..
nå for det øverste brettet..
gjør en ramme mindre enn basen, dette vil være vår x -akse, på utsiden av de mindre kantene på rammen lager du små hull nøyaktig i midten av kantene. kutt stengene i to og fest dem til de store kantene på rammen som vender innover. del dem i to før du gjør det.
dette vil holde det øverste brettet mot rammen og vil hjelpe i rotasjon.
legg nå søylene til de ytre hullene for å få rammen til å stå på basen.
fest søylene til basen og fest festene til dem.
nå for å legge til servomotorene.
en vil bli festet til basen og vil bli festet til rammen ved hjelp av en liten stang for å rotere rammen
en annen vil bli festet til rammen og vil bli festet til det øverste brettet med en liten stang for å rotere det øverste brettet.
servoene skal monteres vinkelrett på hverandre som vist på bildene.
nå er styret klart.
Jeg lagde labyrinten ved hjelp av termokoll og et kartong.
Trinn 3: Sette opp kretsen

Sett opp kretsen som vist på bildet …
Husk at for servoer jeg bruker er den røde ledningen positiv, brun er negativ og oransje er signal.
Bluetooth -modul
Rx går til pin 1
Tx går til pin 0
Signaltråden til basisservoen går til pin 5
Signaltråd av rammeservo går til pinne 6
Husk å legge til ekstra strømforsyning for servoen og bluetooth -modulen. Andre kloke moduler får ikke nok strøm og vil fortsette å koble fra, og viser feil 516. Jeg hadde mange problemer med å feilsøke den og til slutt finne ut problemet og løsningen.
Trinn 4: Lage appen


Ok, først og fremst må du logge inn på mit app inventor for å lage noen apper.
gå til
og klikk på Opprett app! som registrerer deg øverst til høyre, og du er klar til å gå ….
Alt annet jeg har vist i videoen.. ta en titt.
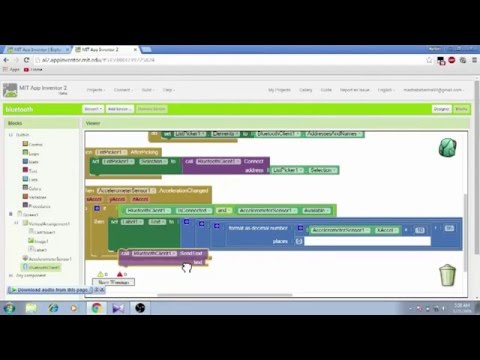
her det grunnleggende:
når skjermen initialiseres i appen (som i dette tilfellet er Skjerm1), -Akselerometeret Sensor er aktivert og følsomheten er satt til maks, dvs. 3.
nå når vi trykker på listevelgeren
-en liste dukker opp, og viser de sammenkoblede enhetene.
(du må koble modulen før du åpner appen, som vanlig er parekoden 1234)
Nå før du velger listevelgeren, -sett listen med de sammenkoblede enhetene og deres adresser
Etter at du har valgt enheten
-Bluetooth -adapteren kobles til den valgte enheten
Nå er modulen koblet til
Nå når acclerometerSensor data blir endret
-Legg dataene til etikettteksten og send dem med Bluetooth -sendingen.
Nå er den vanskelige delen å sende de to dataene om gangen
# akklerometerdata varierer fra 0 til 9,5 når den vippes til venstre og 0 til -9,5 når den vippes til høyre, Det samme gjelder når telefonen er vippet under og oppover avdelinger.
så vi har x- og y -aksens vippedata som vi må sende …
la dataene for x -aksen være X og y -aksen være Y
så det jeg gjorde er dette:
Tekst = "(X*10 (fjern desimaltegnene etter det) +95)*1000 (multipliser med 1000)+Y*10 (fjern desimalpunktene) +95"
så nå varierer dataene fra 0 til 190 for hver akse og legges til for å lage 190180 hvor de tre første sifrene er x -aksen og de tre siste er y -aksekoordinatene …
som vil bli sendt til bluetooth -modulen og vil bli brutt ned til de faktiske datasettene og kartet med servos rotasjonsvinkler i arduino -kode …
Trinn 5: Skrive Arduino -koden


Etter at appen er fullført, kan vi begynne med koden, jeg har lastet opp koden, last den ned, kompiler og send den til arduino, men vent før du sender koden, løsne rx- og tx -pinnene til bluettoh -modulen fra arduino -kortet. Og send koden etter dette kan du feste pinnene tilbake..
koden som mottas fra bluetooth er en streng som har aksedataene våre.
nå Serial.parseInt (); brukes til å lese strengen og konvertere strengen til int i en variabel pos.
nå har pos verdi = 190180 (si) vårt mål er nå å dekryptere dataene, dvs. fjerne x -aksen og y -koordinatene
for x -aksen. divider verdien med 1000, dette vil gi 190.i.e verdi/1000 = 190
og for y -aksen modulær divider verdien med 1000, som vil gi oss 180 dvs. verdi%1000 = 180
beregne nå maks og min posisjonen til servoene du vil ha for å vippe brettet, … i mitt tilfelle er det 180 og 75 og….
nå har vi koordinert x- og y -aksen, nå må vi bare kartlegge koordinatene med min og maks rotasjonsvinkler som vi ønsker for servoene våre.
se koden for detaljer.
Og vi er ferdige … last opp koden, åpne appen koble til og spill….
Vet du at google har laget en for seg selv og er en veldig stor labyrint du noen gang har sett … som også er min motivasjon for å bygge en for meg selv.
Så ha det gøy til neste gang..
Anbefalt:
Programmer din Arduino med en Android -enhet over Bluetooth: 6 trinn (med bilder)
")
Programmer din Arduino med en Android -enhet over Bluetooth: Hei verden, i denne instruksjonsfilen vil jeg vise deg hvordan du programmerer din Arduino Uno med din Android -enhet via Bluetooth. Det er veldig enkelt og så billig. Det lar oss også programmere Arduino hvor som helst vi vil over trådløs Bluetooth … Så
Tilpassbar Laser Maze Med Arduino og Android App: 13 trinn (med bilder)
")
Tilpassbar Laser Maze Med Arduino og Android App: Se mye labyrint fra barnebøker til automatisk labyrintløsningsrobot. Her prøver jeg noe annerledes der jeg løser en labyrint ved hjelp av laserrefleksjon. Når jeg synes det er veldig enkelt i begynnelsen, men det gjør det billig, koster det mer tid for nøyaktighet. Hvis noen vil
Arduino Pocket Game Console + A -Maze - Maze Game: 6 trinn (med bilder)
")
Arduino Pocket Game Console + A -Maze - Maze Game: Velkommen til min første instruerbare! Prosjektet jeg vil dele med deg i dag er Arduino labyrintspill, som ble en lommekonsoll like dyktig som Arduboy og lignende Arduino -baserte konsoller. Det kan bli blinket med mine (eller dine) fremtidige spill takket være utstillingen
Sanntids MPU-6050/A0 datalogging med Arduino og Android: 7 trinn (med bilder)
")
Sanntids MPU-6050/A0 datalogging med Arduino og Android: Jeg har vært interessert i å bruke Arduino for maskinlæring. Som et første trinn vil jeg bygge en sanntids (eller ganske nær den) datavisning og logger med en Android -enhet. Jeg vil fange akselerometerdata fra MPU-6050, så jeg designer
RC -bilhack med Android og Arduino: 6 trinn (med bilder)
")
RC Car Hack Med Android og Arduino: I denne opplæringen skal vi få din gamle RC til å bli kontrollert av Android og gi den noen ekstra funksjoner Denne opplæringen har to unike ting fra andre bilhacks der ute. Vi installerer en servo for jevn kontroll av hjulene2. Vi er